|
|
|
最短走行最短走行最短走行まで完成しました. テスト用の小規模迷路で最短走行をさせるには,最短距離を求める関数run_saitan()内で, ゴール地点のうちの一つの座標を小規模迷路に合わせて与えてやればよいです. この写真の迷路の場合,smap[3][2]=1; としてます. (スタート地点を[0][0]とすると,ゴール地点はyに3つ,Xに2つ進んで[3][2]) 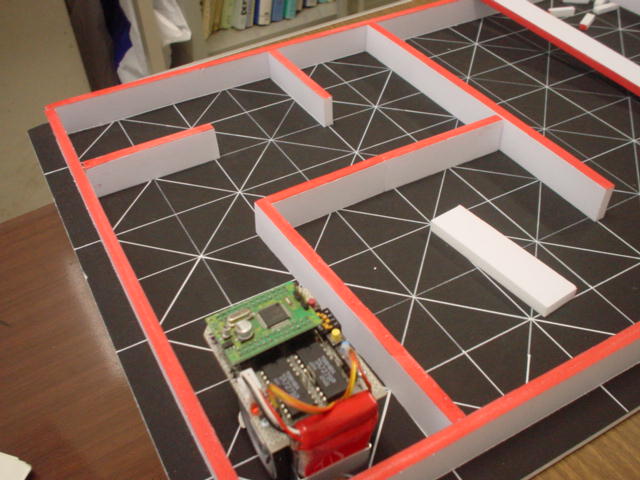 最短走行の動画 (途中でお尻が接触して迷路がズレたので直してます. DIP-SWで最短走行プログラムを呼び出して再スタート) 全プログラム.KNCT-HM1_v1.c まとめ ハーフサイズでマイクロマウスを作成してみましたが,センサの調整と歩幅の変更だけでノーマルサイズの迷路でも走れると思います. また,ノーマルサイズのマウスもモータやセンサ回路を若干変更すればできそうです. マイクロマウスのルール変更でハーフサイズになっても, ステップモータを使ってとりあえず走るだけのマウスを作るのならば 難易度が極端に上がるわけでもないのかな,というのがここまで作った感想です. (基板おこななくても,ユニバーサル基板で普通に半田付けしてできますし.) ジャンル別一覧
人気のクチコミテーマ
|